Простые драйвера шаговых двигателей - Принципиальная схема Контроллер шагового двигателя

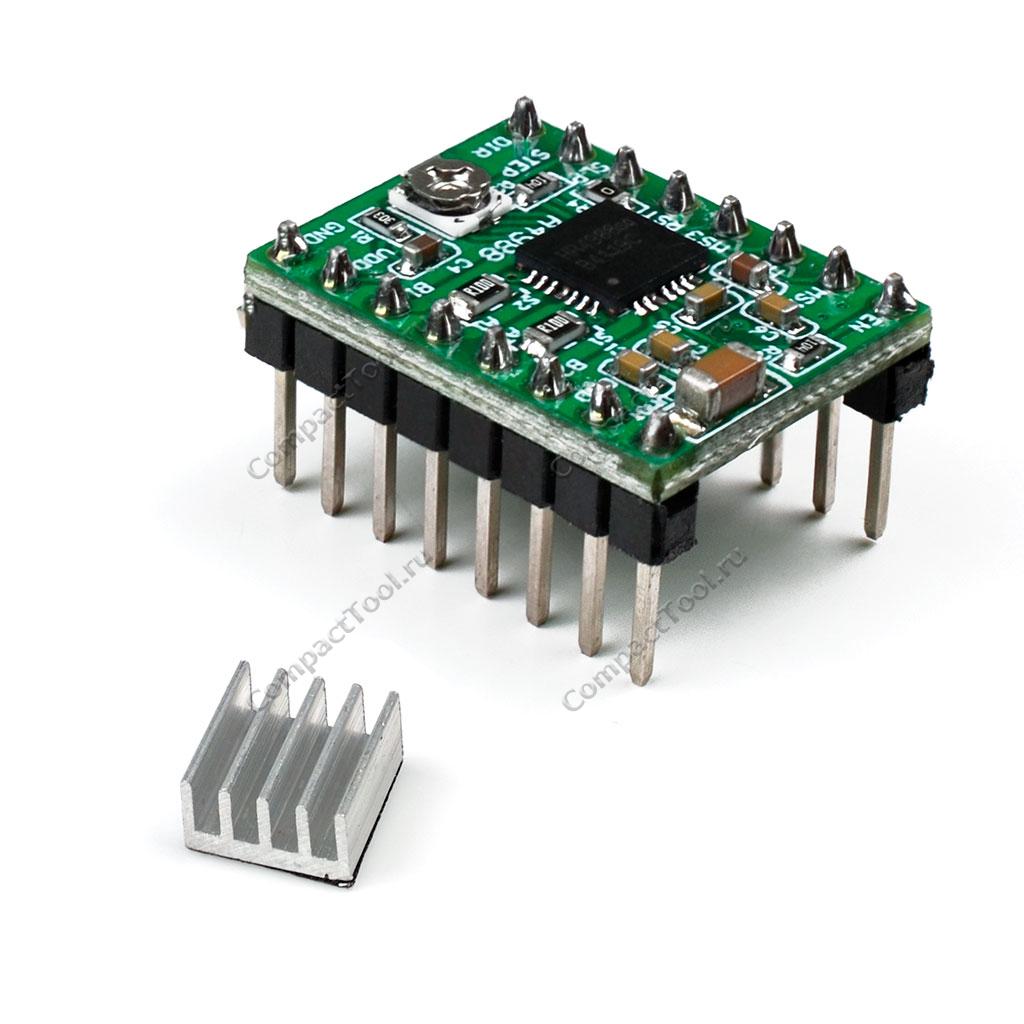
Драйвер шагового двигателя A4988 с радиатором
Контроллер разработан для работы с двигателями малого и среднего типоразмеров с выходным током фазы до 4. Основное преимущество контроллера — удаленное управление шаговым двигателем по локальной сети Ethernet. Также предусмотрено подключение контроллера к компьютеру с использованием USB разъема.


")







Контроллер управления шаговым двигателем SMSD-4.2LAN
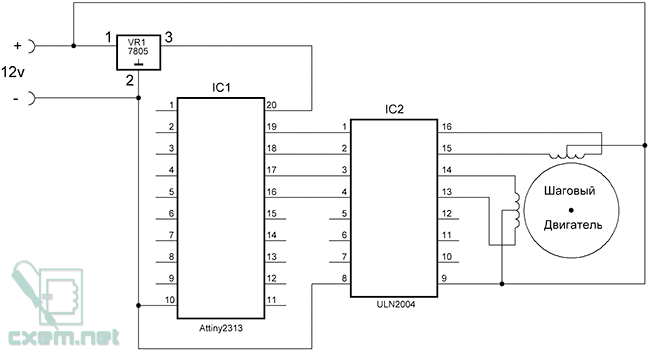
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов — драйверы. Речь в этой статье идет о простых драйверах, достаточных для большинства приложений. Существуют драйверы с гораздо большими возможностями:. Схемы таких драйверов достаточно сложные, а в этих функциях в большинстве приложениях нет необходимости.









")
Управление драйвером шагового двигателя (step\dir) на прерываниях таймера
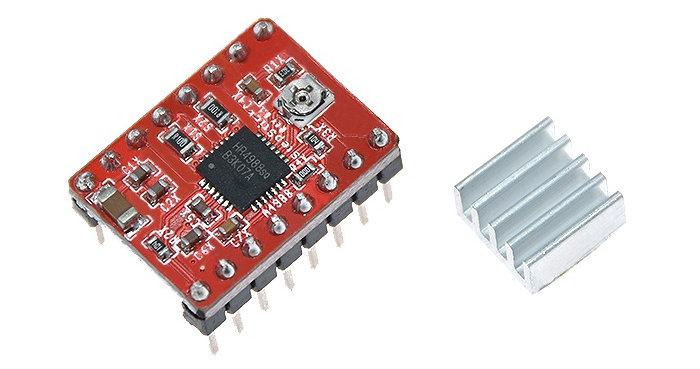
DRV - биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя на микросхеме A, поэтому DRV может стать высокопроизводительной заменой этой платы во многих приложениях. Он работает от напряжения 8,2 - 45 В и может обеспечить ток до 1,5 А на фазу без радиатора и дополнительного охлаждения дополнительное охлаждение необходимо при подаче тока в 2,2 A на каждую обмотку.