Механические роботы схема

Как сделать робота на ROS своими руками. Часть 1: шасси и бортовая электроника
Широкое распространение в производственной деятельности человека получили сегодня промышленные роботы. Они служат одним из эффективнейших средств механизации и автоматизации транспортных и погрузочных работ, а также многих технологических процессов. С появлением станков с числовым программным управлением ЧПУ возникла необходимость в создании программируемых манипуляторов для разных операций по загрузке и разгрузке станков. Так в году американский инженер Д. Девол запатентовал способ управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт.














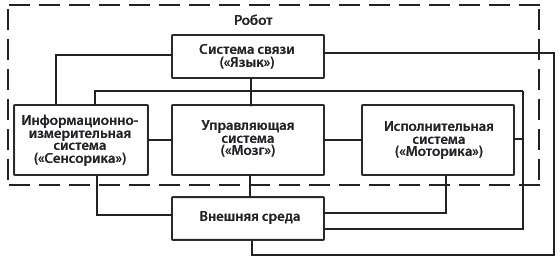
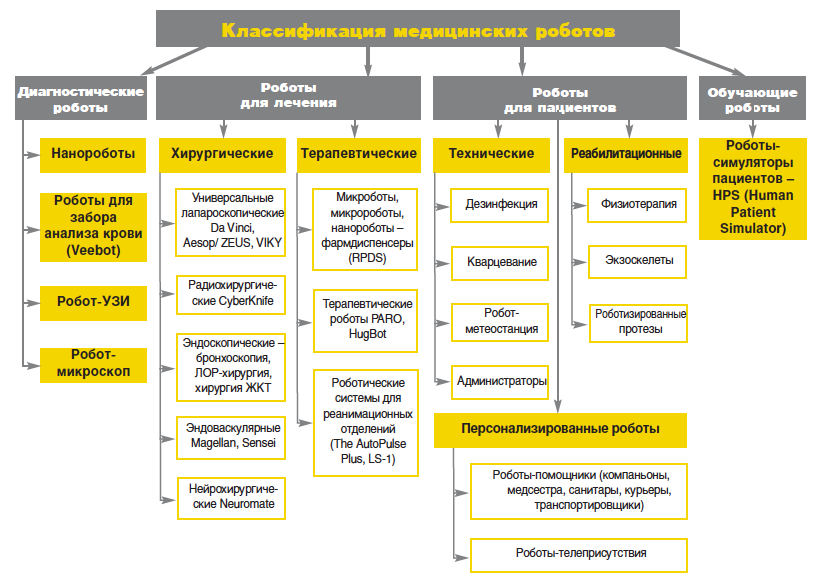
Роботы — это механические устройства, способные выполнять различные задачи с помощью запрограммированных алгоритмов или дистанционного управления. Они могут использоваться в различных областях, таких как промышленность, медицина, космос и многие другие. Существует множество типов роботов, каждый из которых имеет свои особенности и возможности. Например, промышленные роботы используются для автоматизации производства, медицинские роботы помогают в проведении хирургических операций, а космические роботы исследуют новые планеты и астероиды. Создание роботов требует значительных научных и технологических усилий. Необходимо разработать алгоритмы управления, создать механические конструкции, обеспечивающие высокую точность и надежность работы, а также обеспечить безопасность использования роботов.









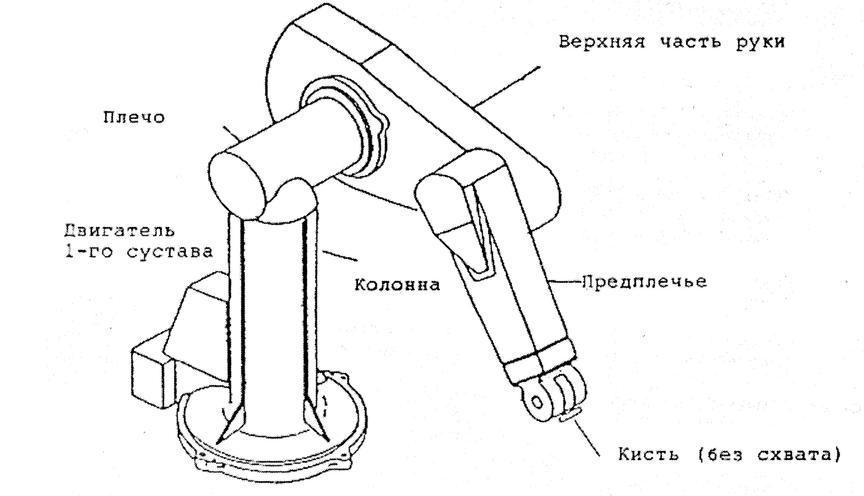
Один из главных недостатков современных роботов — несовершенство их механической части. Для приведения аппаратов в действие обычно используются традиционные пневмо-, гидро- и электроприводы, изготавливаемые с большим участием металлов. Это делает тела механизмов весьма тяжелыми относительно их объема, что, в свою очередь, требует массивных источников энергии, еще больше увеличивающих вес, но, все равно, не способных обеспечить длительное автономное функционирование машин и необходимые силовые характеристики.